{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
排列-浇铸法制备柔性压电纤维复合驱动器
[李世成 , 朱孔军, 裘进浩, 庞旭明]
, 朱孔军, 裘进浩, 庞旭明]
, 朱孔军, 裘进浩, 庞旭明]
|
|


李世成(1987-), 男, 硕士研究生. E-mail:lishicheng1987@126.com
d33, Curie temperature
压电复合材料是将具有强压电效应的陶瓷和柔性聚合物按一定的连通方式、一定的体积或重量比例及一定的空间几何分布制成的材料。两种材料的复合可以优势互补, 获得既具有较强压电性, 又具有良好柔韧性的综合性能优异的压电材料。在智能材料与结构中, 压电复合材料不仅可以解决传统技术中难于解决的一些关键问题, 而且它的作用也是其它材料难以取代的。压电复合材料已受到了高度重视并进行了深入研究[ 1, 2, 3, 4, 5, 6]。
2001年以来, 美国航空航天局兰利研究中心(NASA Langley Research Center)对压电纤维复合材料展开制备及应用研究, 他们采用流延成型法制备陶瓷素坯, 经过一定的烧结工艺, 然后采用精密切割机将陶瓷切成纤维阵列, 并成功制备了粗压电纤维复合材料(Macro Fiber Composites简称MFC)[ 2, 7, 8]。MFC是一种把横截面为矩形的陶瓷纤维横向排列于聚合物中而复合的材料。和主动压电纤维复合材料(Active Fiber Composites简称AFC)不同的是, MFC中的矩形陶瓷纤维增大了陶瓷和电极的接触面积, 提高了其机电转换效率[ 9, 10, 11]。由于MFC的柔韧性较好, 它可以广泛地应用于直升机转子叶片的振动控制、无人机的方向舵控制、组织健康监测、机翼的变形, 人造卫星的振动控制等方面[ 12, 13]。
目前国内关于MFC制备方面的报道相对较少, 开发具有我国自主知识产权的压电纤维复合材料, 对于我国在航空智能结构领域的研究至关重要[ 14, 15]。美国航空航天局的Wilkie等[ 2]所采用的制备方法存在以下几个缺点: a) 陶瓷薄片面积较大烧结较困难, 很难保证薄片的平整; b) 加工风险高, 陶瓷片脆性大, 需要精细操作; c) 不能满足批量生产。本工作采用排列-浇铸法将环氧树脂渗入陶瓷片的间隙中, 先制备出2-2型压电陶瓷复合叠层, 然后利用切割机将该2-2型压电陶瓷复合叠层切割成所需尺寸的粗压电纤维复合材料(MFC)。本研究介绍了MFC驱动器的结构和制备方法, 测量了组成材料的电学与力学性能, 理论推导了MFC的电学性能, 并结合叉指电极对MFC的电学性能进行了分析。
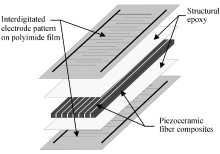
图1为MFC驱动器的结构示意图。MFC驱动器的结构分为三个部分: 压电纤维复合层、一对刻有叉指电极(IDE)的柔性电路板和环氧树脂粘结层。
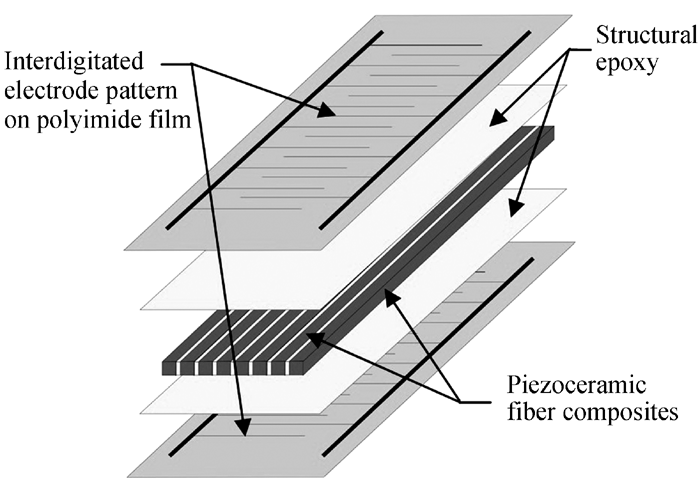 | 图1 MFC驱动器结构示意图Fig. 1 MFC actuator structure diagramInterdigitated electrode pattern, structural epoxy and piezoceramic fiber composites |
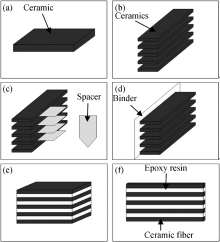
图2为排列-浇铸法制备压电纤维复合材料的工艺图。压电纤维复合材料的制备分为六个步骤。步骤一: 采用流延法制备出尺寸为45 mm×13.5 mm×0.3 mm的0.3Pb(Zn1/3Nb2/3)O3-0.7Pb(Zr0.49Ti0.51)O3(PZN-PZT)陶瓷片, 如图2(a)所示。步骤二: 选择70个已烧结的陶瓷, 将其四个边对齐堆放好, 用方形物体固定在两边, 使陶瓷片保持整齐排列, 如图2(b)所示。步骤三: 将厚度为0.1 mm的隔板裁剪成图示的形状, 然后将隔板依次插入陶瓷片的间隙中, 并用适当的压力使陶瓷片和隔板保持紧密接触, 形成陶瓷-隔板叠层结构, 如图2(c)所示。步骤四: 选择一个方形的底部平整的塑料容器, 尺寸为57 mm×57 mm× 45 mm, 在容器的一个侧壁均匀地涂抹一层环氧树脂胶, 然后将步骤三制备的陶瓷-隔板叠层结构的一侧缓慢靠近容器中的环氧胶, 叠堆的另一端用方形物体夹紧, 随后将容器放入烘箱中, 在85℃下固化30 min后, 将陶瓷片之间的隔板抽出, 得到陶瓷片均匀排列的阵列结构, 如图2(d)所示。步骤五: 用电子秤分别称取50 g环氧树脂E-51, 25 g聚酰胺PA650, 10 g丙酮, 随后将丙酮倒入聚酰胺中搅拌均匀, 再将丙酮-聚酰胺混合物倒入环氧树脂中共同搅拌至均匀, 制备成环氧树脂浇铸液, 然后将浇铸液注入容器中, 在相对真空度为-0.070 MPa时保压1 h, 随后在相对真空度为-0.085 MPa时保压1 h, 然后升温至50℃保温3 h, 再升温至80℃保温1 h, 最后脱模制备出2-2型压电陶瓷复合叠层, 如图2(e)所示。步骤六: 利用金刚石线切割机(STX-402, MTI Corporation)将2-2型压电陶瓷复合叠层切割成所需厚度的MFC, 如图2(f)所示。
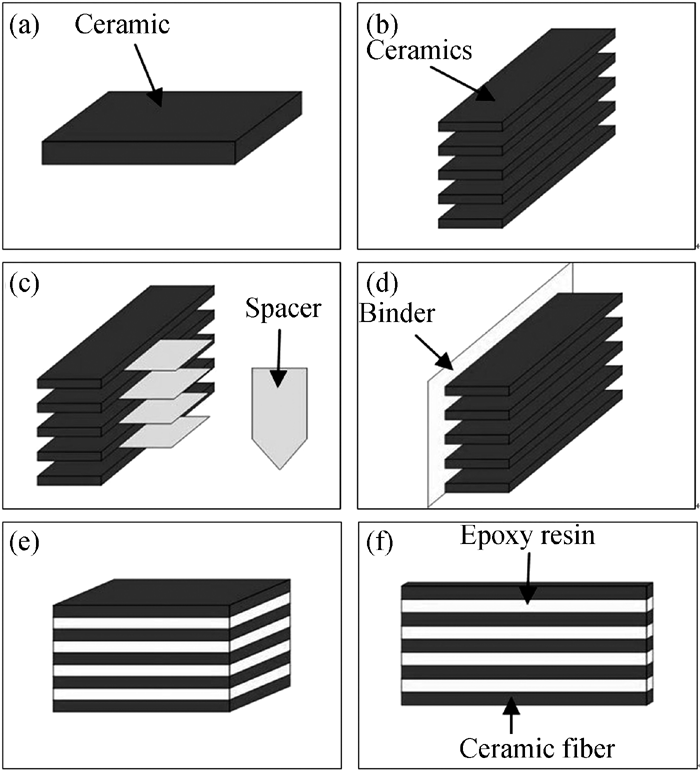 | 图2 压电纤维复合层的制备工艺图Fig. 2 Preparation process map of the piezoelectric fiber composites(a) 45 mm×13.5 mm×0.3mm ceramic wafer prepared by tape-casting; (b) Aligned ceramics; (c) Ceramics separated by spacers; (d) Ceramics fixed with spacers removed; (e) Polymer stack (2-2 laminated composite); (f) Piezoceramic fiber composites |
排列-浇铸法工艺过程简单、易于控制、可重复性好, 成本低、效率高、易于批量生产, 且制备出的复合材料上下表面平整, 压电纤维排列均匀, 环氧树脂的致密性好。
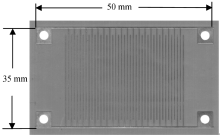
图3为MFC驱动器的叉指电极板实物图。IDE的具体尺寸参照表1。MFC所用的IDE交叉电极是刻在聚酰亚胺薄膜上的, 聚酰亚胺薄膜起到载体和绝缘的作用。这种柔性电路板是采用高精度的光刻技术制备, IDE中导电线路材料采用的是铜箔。铜箔的柔韧性很好, 可以保证MFC驱动器具有较好的耐久性。
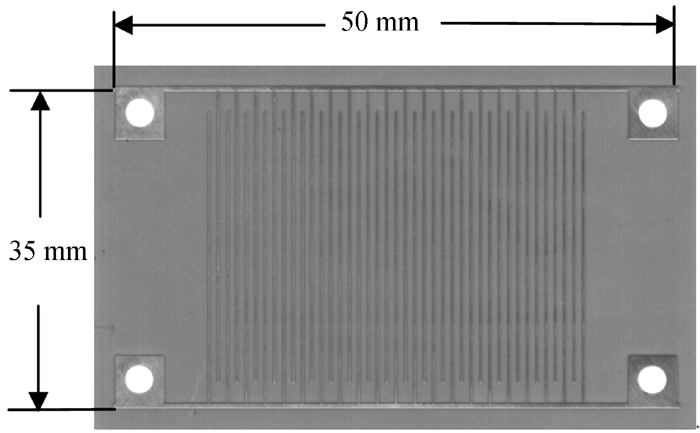 | 图3 MFC驱动器的叉指电极板Fig. 3 Interdigitated electrode plate of MFC actuator (50 mm×35 mm, electrode gap: 1mm, finger width: 150 µm) |
| 表1 MFC驱动器的尺寸 Table 1 Dimension of MFC actuator |
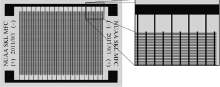
图4为封装好的MFC驱动器示意图及局部放大图。用环氧树脂胶将压电纤维复合层封装在上下电极板之间。上下电极板的交叉线路保持镜面对称, 也就是线路保持完全重合, 再经过真空热压处理, 压力约为4 MPa, 温度设置在60℃, 抽真空4 h, 最终得到MFC驱动器。
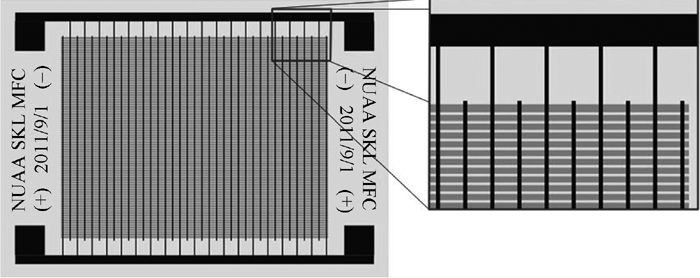 | 图4 封装好的MFC驱动器及局部放大图Fig. 4 The encapsulated MFC actuator and structural detail |
因为压电纤维之间由聚合物连接, 增加了材料整体的柔韧性, 使封装过程变得简单方便。该方法更容易控制、易于批量生产, 且能保证产品性能的一致性。本研究制备的MFC驱动器的几何尺寸如表1所示。
陶瓷的压电应变常数 d33采用准静态压电应变仪(ZJ-3A, Institute of Acoustics, Academic Sinica, Beijing, China)测量, 机电耦合系数 k33、相对介电常数 εr和介电损耗tan δ通过阻抗分析仪(HP 4294A, Agilent, USA)测量。陶瓷和环氧树脂基体的弹性柔顺系数 s33采用沃特世科技(上海)有限公司生产的DMA2980动态热分析仪测量。MFC的上下表面覆盖叉指电极(Interdigitated Electrode简称IDE), 使用2671型万能击穿装置在室温下对其进行极化, IDE的正负电极间距为0.85 mm, 极化电压为2500 V/mm, 极化时间为20 min。结合惠斯通电桥和基于LabVIEW的动态应变系统对MFC的应变进行测试。
表2列出了PZN-PZT陶瓷的电学、力学等性能。根据测试结果可以看出, 陶瓷的致密性较好, 压电常数较高, 居里温度非常高, 弹性柔顺系数较低。较高的居里温度是PZN-PZT陶瓷的突出优点。采用PZN-PZT陶瓷制备的MFC驱动器的性能稳定, 抗老化能力强, 使用温度范围较宽[ 16]。
| 表2 PZN-PZT陶瓷的性能 Table 2 Properties of PZN-PZT ceramics |
MFC性能可以通过两相压电复合材料的复合理论简单计算。因为MFC的主动部分由平行排列的压电纤维和非压电基体材料组成, MFC的压电性能可以利用组成材料各自的性能和下面列出的共应变方程粗略推导[ 16, 17, 18]。
纵向压电常数(pC/N):
 | (2) |

介电常数:
 | (3) |
机电耦合系数:
 | (4) |
公式(1)~(4)中[ 18], 下标 f和 m分别表示复合材料中的压电纤维和基体材料, 
表3列出了利用上述公式推导出的MFC的理论电学性能。上述公式推导出的结果只是作为初级评定, 计算只考虑了MFC被充分极化的情况。在实际中, MFC是将压电材料封装在上下叉指电极板之间的整体结构。只有采用更复杂的公式才能得出更接近实际的数值, 但是, 上述的共应变方程可以作为初级评定[ 17, 18]。
| 表3 压电纤维复合材料的理论电学性能 Table 3 Theory of electrical properties of piezoceramic fiber composite |
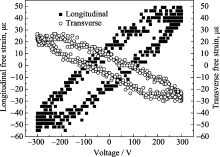
图5为MFC驱动器的电压-应变曲线图。在MFC的上下表面各粘结一个纵向的和横向的电阻应变计(BE120-3AA, 齐齐哈尔市万达电器设备厂), 将MFC驱动器的正负极连接到NI 9263输出电源上, 再把电阻应变计连接到NI 9237惠斯通电桥模拟输入组件上, 在LabVIEW程序中测量MFC驱动器的应变性能。通过电压放大设备施加振幅±300 V、频率10 Hz的正弦电压。实验测得了MFC的纵向应变和横向应变曲线。MFC的纵向应变振幅为100 µε, 横向应变振幅为58 µε。
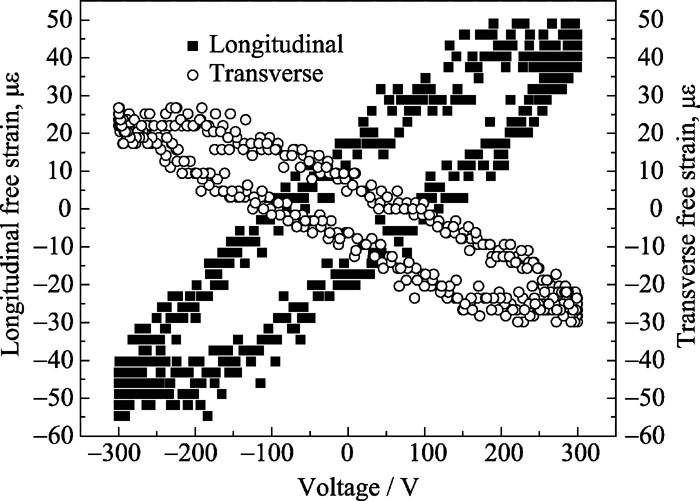 | 图5 MFC驱动器的自由应变性能: (±300 V, 10 Hz, 正弦电压, 循环4次)Fig. 5 Free-strain performance of MFC actuator (±300 V, 10 Hz sine wave, 4 cycles) |
通过简单地计算, 可以得到MFC驱动器的纵向和横向伸缩分别为3.6和1.7 μm。结果表明, 叉指电极产生的平面内的电场沿着压电纤维轴心方向, 促使压电纤维产生较大的纵向压电效应, 所以在纤维轴向发生的机械响应最大, 从而产生较大的纵向伸缩振动。
从电压-应变曲线(图5)还可以看到MFC驱动器的电压-应变曲线存在迟滞现象。在本研究中将迟滞性量化定义为零电压位置对应的纵向应变的差值与总的纵向应变之比。迟滞性越大, 所测样品的机电转换能力越差; 迟滞性越小, 所测样品的机电转换能力越强[ 17]。在本实验测试条件下, 得到MFC驱动器产生的电压-应变的迟滞为33%。结果表明, MFC驱动器具有较强的机电转换能力。
1) 采用排列-浇铸法制备的MFC驱动器纤维排列整齐均匀, 压电纤维复合层表面平整, 复合层与电极板的接触性较好, 使MFC驱动器的性能更加优越。
2) 叉指电极产生的电场与压电纤维轴心方向平行, 促使压电纤维产生较大的纵向压电效应( d33), 所以在纤维轴向发生的机械响应最大( d33> d31)。
3) 施加300 V、10 Hz的正弦交变电压, MFC驱动器可以产生100 µε的纵向应变和58 µε的横向应变, 即纵、横向伸缩分别可达3.6和1.7 μm, 相比于传统压电陶瓷, MFC驱动器具有明显优越的性能。
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
|
| [13] |
|
| [14] |
|
| [15] |
|
| [16] |
|
| [17] |
|
| [18] |
|